



 |
 |
 |
 |
Baza dydaktyczna
Pomieszczenia dydaktyczne oraz laboratoryjne wykorzystywane w ramach zajęć dydaktycznych w Instytucie Robotów i Konstrukcji Maszyn znajdują się w budynkach nr 54 i 62 Wydziału Inżynierii Mechanicznej.
W Instytucie Robotów i Konstrukcji Maszyn (w budynku 54) znajdują się następujące elementy bazy dydaktycznej:
Sale dydaktyczne:
- jedna sala audytoryjna na 110 miejsc wyposażona w klimatyzację oraz nowoczesne środki audiowizualne

- dwie sale wykładowe na ok. 60 osób każda wyposażone w podstawowe środki audiowizualne,
- sale wykładowe na ok. 60 osób każda wyposażone w podstawowe środki audiowizualne,
- trzy małe sale dydaktyczne do ćwiczeń rachunkowych na dwadzieścia do trzydziestu miejsc siedzących,
- dwie specjalistyczne pracownie komputerowe (w budynku 54) wyposażone w 12 i 14 stanowisk komputerowych z oprogramowaniem Catia i MSC Adams oraz wielkoformatową drukarkę,
- dwie specjalistyczne pracownie komputerowe (w budynku 62) wyposażone w 16 i 15 stanowisk komputerowych z oprogramowaniem AutoCAD, Solidworks, Autodesk Fusion, NetFabb, Autodesk Inventor oraz Catia.


Specjalistyczne laboratoria dydaktyczne:
Pracownia Eksploatacji Maszyn Inżynieryjnyc, w której znajdują się:
- stanowiska do ćwiczeń laboratoryjnych z przedmiotu „Eksploatacja Maszyn Inżynieryjnych” (i innych),
- elementy hydrauliki siłowej, stanowiska diagnostyczne silników spalinowych oraz układów hydraulicznych.
Pracownia Wirtualnego Pola Walki Wojsk Inżynieryjnych w skład której wchodzi trenażer do szkolenia operatorów robotów dla Wojsk Inżynieryjnych składający się z dwudziestu czterech symulatorów wraz z niezbędnym oprogramowaniem dla osób ćwiczących oraz stanowisko instruktorskie składające się z trzech symulatorów;.


Poligon badawczy maszyn i pojazdów zbudowany szczególnie do oceny stateczności poprzecznej i wzdłużnej robotów inżynieryjnych poruszających się w trudnych warunkach terenowych, poligon posiada tory jazdy o różnym stopniu pochylenia (poprzecznego i wzdłużnego) oraz przeszkody do pokonania w warunkach zabudowy miejskiej.
Pracownia Budowy Sprzętu Inżynieryjnego wyposażona w stanowisko do badań kinematyki oraz sterowania osprzętem koparek hydraulicznych, stanowisko do badań elementów hydrauliki siłowej.
Pracownia Hydrauliki i Hydrotroniki – nowo powstałe laboratorium do sprawdzania elementów układów hydraulicznych w połączeniu z hydrotronicznymi stosowanymi w układach sterowania (szczególnie zdalnego) robotów inżynieryjnych.
Pracownia Maszyn Fortyfikacyjno-Drogowych (d. Park Maszyn Inżynieryjnych), z maszynami roboczymi (inżynieryjnymi) oraz sprzętem wojsk inżynieryjnych, minipoligonem do badań maszyn inżynieryjnych w naturalnych warunkach eksploatacji.
Pracownia identyfikacji podstawowych cech i parametrów hydraulicznych układów napędowych, pracownia stanowi bazę aparaturową, w oparciu o którą studenci mogą poznawać zjawiska zachodzące w układach hydraulicznych, identyfikować cechy wpływające na energochłonność procesów przepływu cieczy, wyznaczać wartości wpływających na to parametrów instalacji oraz oceniać dynamiczne i hydrostatyczne oddziaływania płynów na ciała stałe.
Pracownia Podstaw Elektrotechniki oraz Wyposażenia Elektronicznego Sprzętu Inżynieryjnego – stanowiska laboratoryjne badań układów elektrycznych i elektronicznych; Hamownia, ze stanowiskami do badań elementów napędowych maszyn inżynieryjnych.
Pracownia hydrotroniki i automatyki napędów robotów – ze stanowiskami do badań elementów napędowych maszyn inżynieryjnych.
Pracownia Energetyki – stanowiska do badania układów energetycznych oraz pneumatycznych.
Pracownia Źródeł Prądu wyposażona w trzy spalinowe agregaty prądotwórcze oraz elektrownię wiatrową.
Pracownia Badań Zmęczeniowych wyposażona w pulsatory hydrauliczne do badań: w złożonym stanie naprężenia (Instron 8802 MT), badań w jednoosiowym stanie naprężenia (Instron 8802) oraz badań przy obciążeniach dynamicznych i szybkozmiennych (MTS 370.50).
Pracownia Zaawansowanych Metod Pomiarowych Właściwości Mechanicznych Materiałów wyposażona w system cyfrowej korelacji obrazu DIC Dantec Q400, system laserowej interferometrii plamkowej ESPI Dantec Q300, kamerę termowizyjną FLIR 7500 oraz kamerę do pomiaru procesów szybkozmiennych PHOTRON S7.
Pracownia szybkiego prototypowania wyposażona w 14 stanowisk do wytwarzania prototypów elementów konstrukcyjnych z wykorzystaniem tzw. druku 3D. Drukarki 3D zróżnicowane pod względem budowy oraz układów kinematycznych umożliwiają drukowanie z szerokiej gamy materiałów termoplastycznych i żywic w technikach SLA oraz FDM.
Pracownia Zaawansowanych Technik Łączenia Materiałów wyposażona w zrobotyzowane stanowisko do spawania i napawania elementów konstrukcyjnych z wykorzystaniem technik spawalniczych LBW, PTA, GTA, GMA, MMA oraz zgrzewania tarciowego FSW.
Pracownia Programowania i obsługi obrabiarek CNC wyposażona w cztery stanowiska dydaktyczne w postaci obrabiarek CNC – dwie tokarki i dwie frezarki. Dodatkowym elementem wyposażenia jest ploter laserowy do realizacji procesów cięcia z użyciem wiązki lasera.
W budynku 62 znajdują się następujące pracownie:
Pracownia Mikroskopii Elektronowej i Świetlnej wyposażona w transmisyjny mikroskop elektronowy JEOL JEM1230, transmisyjny mikroskop elektronowy JEOL JEM-100B, mikroskop optyczny NEOPHOT-2 z oprogramowaniem do analizy obrazu LUCIA,
Laboratorium Komputerowego Wspomagania Projektowania wyposażone w 27 stanowisk komputerowych z licencjonowanym oprogramowaniem AutoCAD oraz Catia,
Laboratorium dydaktyczne z Podstaw Konstrukcji Maszyn wyposażone w 5 stanowisk do zajęć laboratoryjnych.
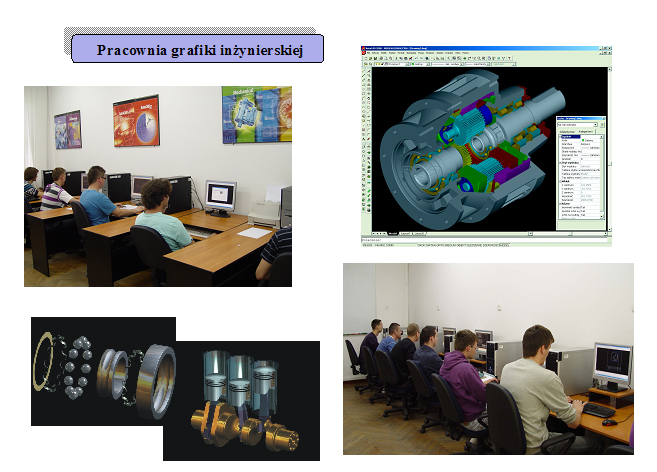
Pracownia grafiki inżynierskiej
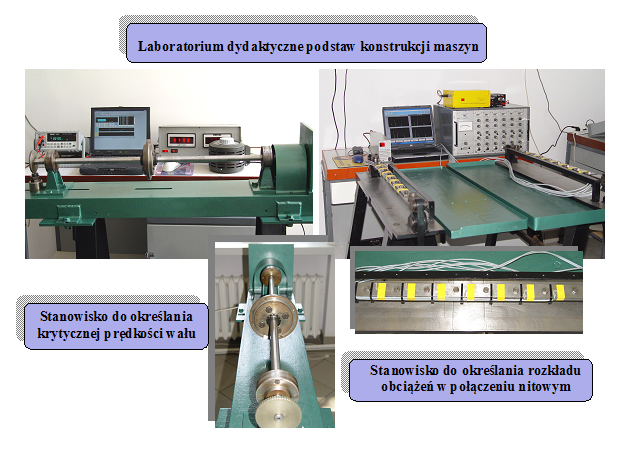
Laboratorium dydaktyczne podstaw konstrukcji maszyn
Sprzęt komputerowy i obliczeniowy:
W Instytucie znajdują się dwie zlokalizowane w budynku nr 54 pracownie komputerowe, w których studenci mają dostęp do:
- 16 stacji roboczych – sala nr 20;
- 14 stacji roboczych – sala nr 25;
zarówno w ramach zajęć obowiązkowych jak i działalności w ramach koła naukowego studentów.
Pracownie komputerowe Instytutu Robotów i Konstrukcji Maszyn
Obie pracownie laboratoryjne wyposażone są w projektory i ekrany, które w istotny sposób pomagają studentom zrozumieć poruszane na zajęciach zagadnienia. Na komputerach zainstalowane jest oprogramowanie wspomagające proces projektowania: CATIA V5, MD Adams, Easy5, Matlab, Plus+1 Guide.
Dodatkowo na wyposażeniu sali nr 20 znajduje się 16 połączonych z komputerami stanowisk do projektowania i programowania systemów sterowania opartych o magistralę CAN (rys.2), które wraz z oprogramowaniem Plus+1 Guide umożliwiają studentom zdobywanie praktycznej wiedzy dotyczącej układów sterowania.

Sala laboratoryjna nr 20 podczas zajęć z programowania układów sterowania opartych o magistralę CAN-bus
Oprogramowanie:
Instytut Budowy Maszyn posiada licencje na najnowocześniejsze oprogramowanie przyspieszające proces projektowania:
| MD Adams | Multidyscyplinarne oprogramowanie służące do modelowania i symulacji najbardziej złożonych zjawisk dynamicznych oparte o metodę układów wieloczłonowych (ang. Multibody Systems). Tworzone modele noszą nazwę wirtualnych prototypów. |  |
|
|
||
| CATIA V5 | Pakiet zintegrowanego oprogramowania CAD/CAM/CAE wraz z modułem FEM w istotny sposób zwiększającego efektywność procesu projektowania jak również analizy układów kinematycznych. Powszechnie stosowany w wielu gałęziach przemysłu. |  |
|
|
||
| Easy5 | Pakiet umożliwiający modelowanie i symulowanie układów dynamicznych, hydraulicznych i sterowania. Jego połączenie z programem MD Adams pozwala modelować wzajemne interakcje układ sterowania – mechanizm. |  |
|
|
||
| Matlab | Pakiet wspomagający prowadzenie zaawansowanych obliczeń naukowych, inżynierskich jak również przeprowadzania symulacji i analizy modeli i układów sterowania w oparciu o pakiet SIMULINK. |  |
|
|
||
| Plus+1 Guide | Tworzenie dokumentacji techniczno-projektowej w zakresie mechaniki i budowy maszyn, budownictwa, instalacji elektrycznych, architektury w postaci rysunków technicznych. Możliwość wykonywania prostych modeli parametrycznych. Modelowanie bryłowe |  |
|
|
||
| CATIA V5 | Modelowanie bryłowe i powierzchniowe. Modelowanie połączeń elementów maszyn. Modelowanie ruchu maszyn. Wielowariantowa analiza kinematyczna, wytrzymałościowa. Przygotowanie produktu do wytwarzania poprzez opracowywanie technologii wytwarzania na maszynach CNC. Rapidprototyping. Modelowanie i analiza ergonomiki z zastosowaniem wirtualnych fantomów |
 |
|
|
||
| SolidWorks | Modelowanie bryłowe i powierzchniowe. Modelowanie połączeń elementów maszyn. Makra pozwalające na genero-wanie parametrycznych modeli element-tów maszyn. Analiza wytrzymałościowa modeli |  |
|
|
||
Stanowisko do badania zjawiska wężykowania pojazdów przegubowych

Stanowisko do badań kinematyki osprzętów roboczych


Stanowisko budowy elementów hydrauliki siłowej

Stanowisko do badania natężenia przepływu układów hydraulicznych

Stanowisko do badania składanych mostów nożycowych

Stanowisko laboratoryjne wyznaczania charakterystyk hydrostatycznych układów napędowych z kompensacją obciążenia


Minimaszyny – koparka, ładowarka

